
ESPECIAL CORONAVIRUS ( 30/3/2020)
Hola Buenos, días chicos, deseo que todo en vuestras casas esté bien, deseando reencontrarnos de nuevo.
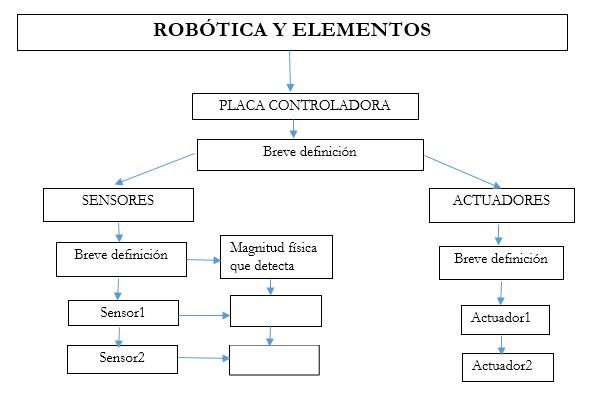
Bueno os dejo una tarea más, una vez que habéis leído los apuntes que os envíe, ahora vais a continuar con vuestro libro, empezamos con los actuadores y sensores, ya sabéis que la idea es hacer un esquema cuando conozcamos estos componentes, por tanto os debe quedar claro que es cada uno de ellos y en el caso de los sensores debéis saber que magnitud física detecta cada uno, para poder transformarla en un nivel de tensión. Debéis leer lo relacionado en el libro sobre sensores y actuadores y marcar definiciones y características principales, os recuerdos que vienen muy repartidos a lo largo del tema, no debe escaparse ninguno.
Debéis hacer los ejercicios 3 y 4 de la página 77, los enviáis a la vez que el esquema.
Os adjunto un tipo de esquema para que lo completéis.
Os recuerdo los contenidos que tenemos para esta 3ª evaluación, tema 2 del libro Programación Control y Robótica, junto con los apuntes que os envíe, y lo que vais a leer ahora relacionado con sensores y actuadores.
ESPECIAL CORONAVIRUS (25/3/2020)
Buenos días, chicos, aquí os dejo unos apuntes para que vayáis viendo con un poco más de detalle como es nuestra placa controladora, y además conozcáis lo que son los sensores y actuadores.
¿Qué es un robot?
La palabra robot proviene del checo: robota, que significa trabajo duro o forzado. Se usó por primera vez durante la obra de teatro Rossum Universal Robots de Karel Čapek y su uso se extendió gracias a las obras de ciencia ficción creadas por el escritor Isaac Asimov.
A menudo nos imaginamos a un robot como una máquina con forma humana que camina, habla, gesticula… pero en realidad es algo mucho más sencillo:
“Un robot es una máquina automática programable que es capaz de interpretar información del medio físico para modificar su conducta. Tiene la capacidad de interactuar con el entorno y, en función de ello, realizar unas funciones u otras.”
| Todo robot tiene tres tipos de componentes: Sistema de control: como una placa controladora.Sensores: capaces de interpretar información del mundo o del propio robot.Actuadores: producen un efecto sobre el mundo o sobre el propio robot. |
{kind=link}
Si comparamos un robot con una persona, los sensores serían sus sentidos. Éstos transmiten información a su sistema de control o cerebro, modificando su comportamiento e influyendo sobre el mundo mediante sus actuadores. Además, un robot necesitará una fuente de energía para funcionar y una estructura física para sostener los elementos que lo componen.
El sistema de control: la placa controladora
El cerebro o la placa controladora es como un pequeño ordenador. Básicamente es un microcontrolador al que se le pueden conectar sensores (sentidos), y actuadores (músculos, voz, etc).
{kind=link}
La placa ZUM está formada por los siguientes componentes:
- Microprocesador: es el microchip que realiza todas las operaciones necesarias para que tu placa ejecute tu programa.
- Pines digitales: solo pueden tener dos valores: 1 o 0, todo o nada, encendido o apagado.
- Pines analógicos: pueden tener múltiples valores: 0, 1, 34, 255, etc.
- Entrada micro-USB: a través de esta entrada la placa se comunica con el ordenador.
- Entrada de baterías: la placa recibe energía de las baterías o la fuente de alimentación para poder funcionar.
- Bluetooth: permite a la placa comunicarse sin cables con un ordenador, smartphone u otros.
- Botón ON/OFF: quita la energía a los pines de tu placa de forma que puedas programar sin que el robot esté continuamente moviéndose.
- Reguladores de tensión: adaptan la tensión de alimentación al voltaje en que trabaja la placa: 5V.
COMO VEÍS, ESTA PLACA (Zum Core de BQ) ES EXACTAMENTE IGUAL A LA QUE TENÉIS EN EL LIBRO (Arduino), comprobar que sus componentes son los mismos, por tanto tiene la misma función. Son placas de hardware y software libre.
Hardware libre: sus especificaciones y esquemas eléctricos son de acceso pública, cualquiera puede hacer uso de ellos.
Software libre: Es el software que cualquier usuario puede hacer uso de él, distribuirlo, copiarlo, estudiarlo, modificarlo, etc sin ningún tipo de permiso.
Los sensores
Un sensor no es más que un componente electrónico que transmite más o menos electricidad en función de un elemento físico, como la luz, el sonido, la distancia, etc. Si queremos conectar un sensor a nuestra placa, tendremos que averiguar primero si el sensor es digital o analógico.
El sensor digital
| Un sensor digital solo puede tener dos valores: 1 o 0, todo o nada. Un ejemplo de sensor digital es un pulsador, en el que cuando pulsamos el botón éste vale 1, y cuando no lo pulsamos 0. En una placa ZUM o similar, los sensores digitales irán conectados en los pines digitales D0-D13. |
| IMPORTANTE: Los pines digitales 0->RX y 1->TX se usan para recibir y enviar información, por lo que si les conectas un sensor o actuador y programas la placa, puede que el programa no se cargue o no funcione correctamente. Además, el pin D13, debido a la existencia del LED D13, no recibe la misma tensión, por lo que puede darte problemas en el uso de algunos elementos. Usa con precaución dichos pines. |
El sensor analógico
| Un sensor analógico puede tener múltiples estados siendo capaz de transformar la cantidad de luz, temperatura u otros elementos físicos en un valor comprendido entre 0 y 1023. Un ejemplo de sensor analógico es un sensor de luz, donde dependiendo de la cantidad de luz que el sensor recibe dará un valor mayor o menor. En una placa ZUM o similar los sensores analógicos irán conectados en los pines A0-A5. |
Los actuadores
Un actuador es un componente electrónico capaz de realizar una acción sobre el entorno. Por ejemplo, un motor que mueve una rueda, un LED que indica que un aparato está encendido, un altavoz que emite un sonido de alerta, etc.
| Utilizando una placa ZUM o similares, todos los actuadores que utilicemos irán conectados a un pin digital. Hay actuadores, como un LED, que solo tienen dos estados, mientras otros como un servomotor, pueden tener múltiples posiciones y por tanto ser analógicos. Para este tipo de actuadores nuestra placa, que es digital, se servirá de un truco o método conocido como señal PWM. De momento no te preocupes por ella, veremos su utilidad más adelante. |
¿Cómo piensa una placa controladora?
A veces crearás un proyecto o un robot que no se comportará como habías pensado. Recuerda que tu placa controladora es el cerebro de tu máquina, pero es mucho más limitado que un cerebro humano.
| La placa controladora… Piensa (procesa) las cosas de una en una, no puede hacer dos cosas a la vez.Piensa y repite acciones muy rápido, tanto que a veces no podemos ni ver lo que está haciendo y hay que decirle que espere un poco.Nunca hace nada que no le hayas dicho. Hay que programar todo lo que quieras que haga y darle las órdenes de una en una.Normalmente, cuando la placa acaba su lista de órdenes, vuelve a empezar de nuevo, repitiendo su programación una y otra vez. |
A lo largo de este curso conoceremos y aprenderemos a utilizar un montón de sensores y actuadores que te serán de gran utilidad. Recuerda que el secreto no es la cantidad, sino conocer bien lo que tienes para darle usos increíbles. Vuelve a esta página siempre que tengas una duda o déjanos un comentario si te cuesta comprender algún concepto.
OBJETIVO:
Leer estos apuntes para poder empezar con tipos de sensores y actuadores.
Construir un esquema cuando conozcamos todos los sensores y actuadores que hay, por tanto de momento, solo leerlo, e ir pensando como lo llevaréis al esquema que haremos la semana siguiente.
ALUMNOS DE 3º ESO A y B (día 18/3/2020)
Hola chicos, espero que todos estéis bien y cumpliendo las recomendaciones de las autoridades sanitarias, es fundamental.
Para que los días sean mas llevaderos vamos a trabajar un poco, habíamos visto el punto 1 y 2 del tema 2,.
Como ya os comenté el punto 2 habla de una placa controladora en concreto Arduino, pero nosotros vamos a usar otra, son todas casi iguales, cambia el fabricante, la nuestra es de la marca bq, (como los móviles) a la vuelta la usaremos, por eso es importante que la teoría la controleis.
Una vez leído y subrayado, hacéis los siguientes ejercicios:
– Contesta las siguientes preguntas:
1) Define placa controladora.
2) Nombra y explica para qué sirven las partes señaladas de la placa controladora.
–Lee la página 47 y contesta las siguientes preguntas:
3) Explica las diferencias entre microprocesador y microcontrolador.
4) Indica a qué tipo de memoria de la placa pertenece cada una de estas características:
– Sus datos se pierden al apagar la placa:
– Es una memoria de tipo flash:
– Es como un pequeño disco duro que guarda datos de distintas ejecuciones del programa:
– Es una memoria en la que no se pueden sobreescribir datos, sólo pueden leerse:
5) Indica cuáles son los buses que se ven en la imagen de la página 47 y explica para que crees que sirven
Son ejercicios del libro, los hacéis en vuestro cuaderno, y me los enviáis…no sé si tenéis escáner en casa, pero creo que hay una aplicación para móvil que se llama Adobe Scan que os escanea lo que hagáis en papel y genera un documenro pdf en el móvil y desde el móvil me lo enviáis al correo habilitado para esta situación: rosa.munoz.online@smbosque.es no el que conocíais.
Debéis entregarlo el próximo martes día 24, el fichero debésis llamarlo de la siguiente forma: Apellido-Nombre, ejemplo: Lopez-Maria.
Cualquier duda me la hacéis llegar, seguro que tenéis grupo de w de la clase, cuando os llegue el correo lo avisáis por el grupo por si alguien no lo ha recibido. Saludos Rosa
ÚLTIMOS RECORDATORIOS:
1.- DEBÉIS ENVIARLO AL CORREO:
2.- DEBÉIS NOMBRALO:
Apellido-Nombre
Mujeres científicas a lo largo de la historia, algunas españolas. Ir al documento
https://forms.gle/WBRUxv8sHuVYVDjQ8